Hi there, I'm Bogdan

I am a Senior Machine Learning Engineer and Kaggle Expert based in Paris. My work centers on high-scale architecture, bridging the gap between Applied Mathematics and production-grade AI. Currently, I am working on a conversational search agent at Pitchbook Data that supports over 100,000 monthly user interactions.
My professional focus is on building systems that are both mathematically sound and computationally efficient. At Pitchbook, I manage the taxonomy and orchestration for a complex conversational search agent. This role builds on my experience at VINCI (Cyclope.ai), where I engineered real-time computer vision services capable of processing 300 million daily requests with sub-200ms latency.
I hold an MSc in Applied Mathematics from the National University of Kyiv-Mohyla Academy. During my Master's program, I had an internship at Samsung Research, specifically within the Intelligent Security Lab, focusing on voice security applications.
I completed a research residency at the University of Toronto, where I worked under the supervision of Dr. Brokoslaw Laschowski and Dr. Alex Mihailidis on video classification models for exoskeleton control, resulting in three publications and state-of-the-art accuracy on the StairNet dataset.
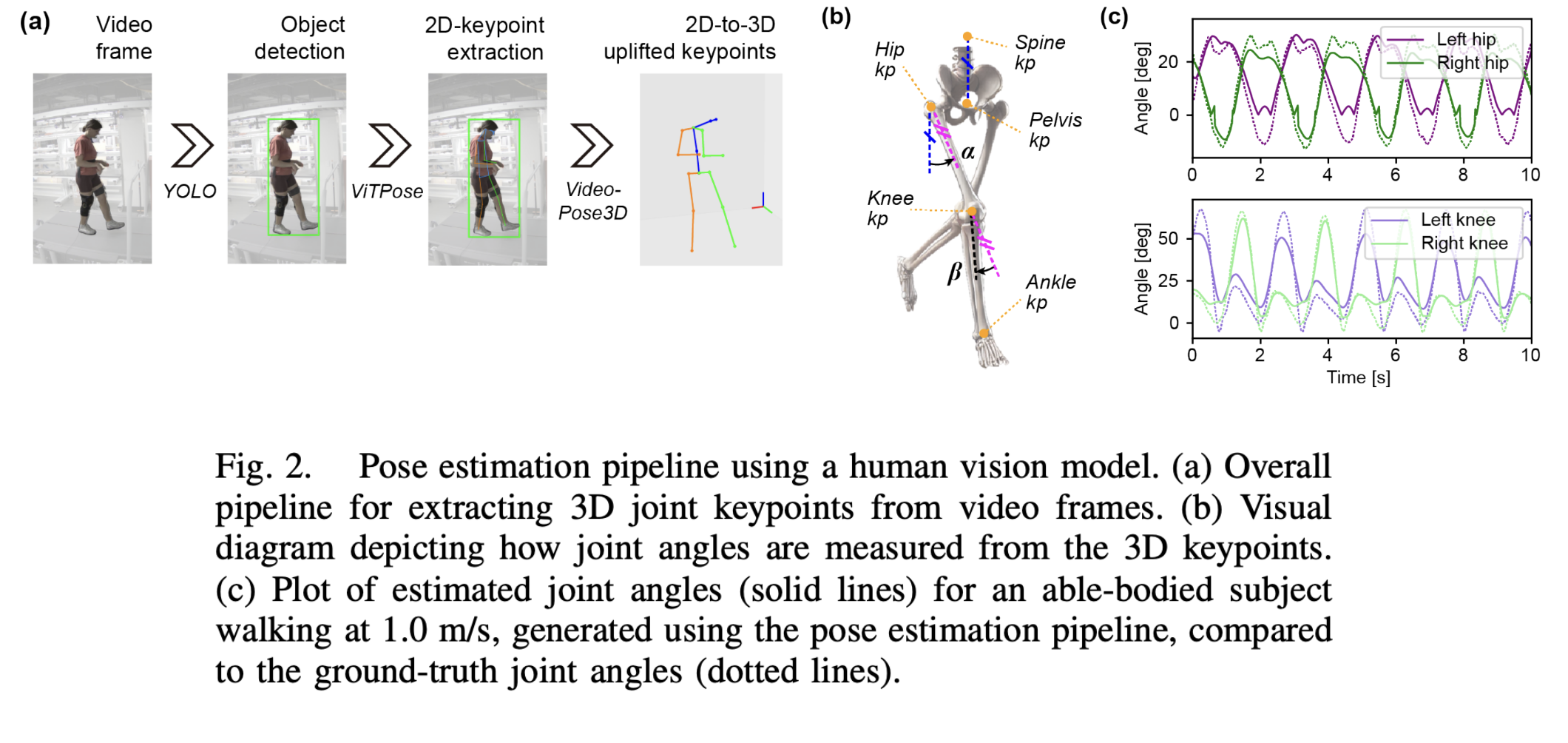
Most recently, I collaborated with Dr. Inseung Kang from Carnegie Mellon University on computer vision-based transfer learning for real-time joint kinematics estimation using smartphone cameras with minimal data, enabling accurate exoskeleton control across novel users in clinical populations.
Outside of engineering, I am a robotics enthusiast. I spend my free time building FPV drones and miniature models, or walking my Beagle and Dachshund.
Publications
Personalization of Wearable Sensor-Based Joint Kinematic Estimation Using Computer Vision for Hip Exoskeleton Applications
International Conference On Rehabilitation Robotics (ICORR) 2025
Computer vision-based deep learning framework enables real-time joint kinematics estimation from smartphone cameras with minimal data (1-2 gait cycles). Transfer learning adaptation reduces error by 9.7-19.9% and demonstrates potential for personalized exoskeleton control across novel users in clinical populations.
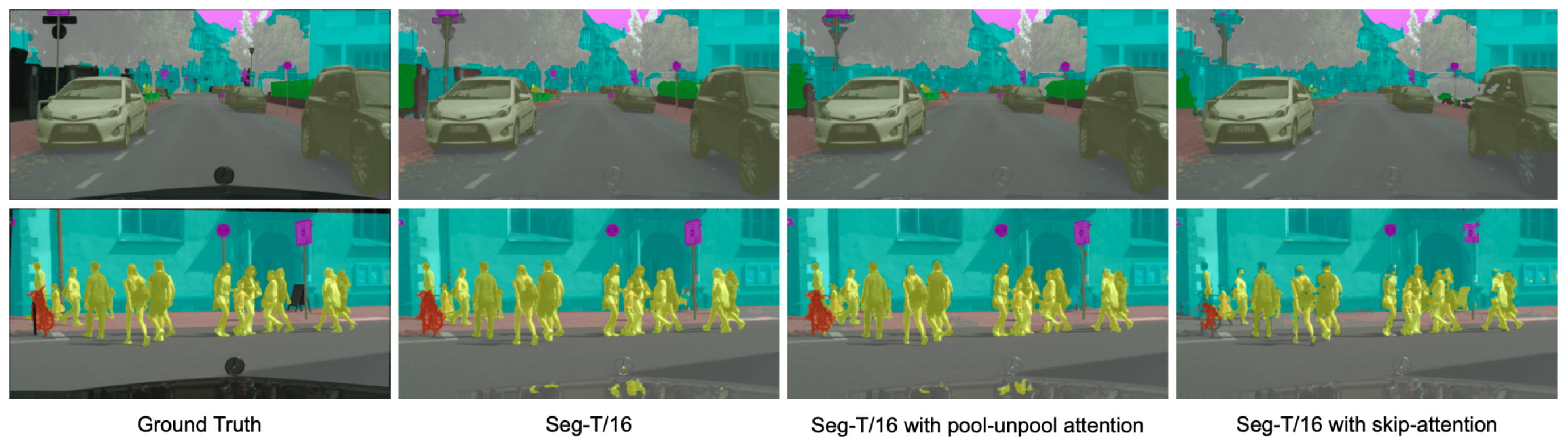
Towards Lightweight Transformer Architecture: an Analysis on Semantic Segmentation
ACDSA 2024 — Oral Presentation
Novel skip-attention and pool-unpool mechanisms improved transformer inference speed by up to 101.7% on Cityscapes while maintaining segmentation quality.
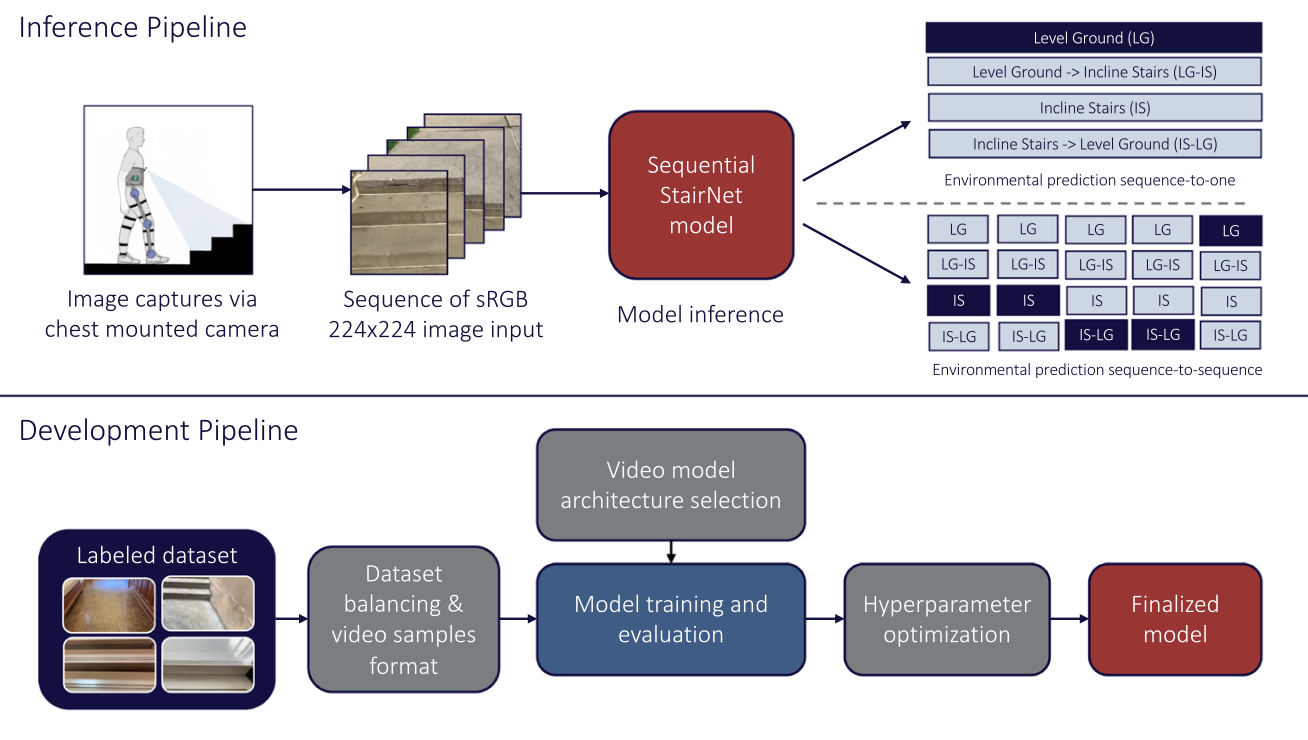
StairNet: Visual recognition of stairs for human-robot locomotion
BioMedical Engineering OnLine
Comprehensive comparison of state estimation models for walking environment recognition in robotic prosthetics and exoskeletons.
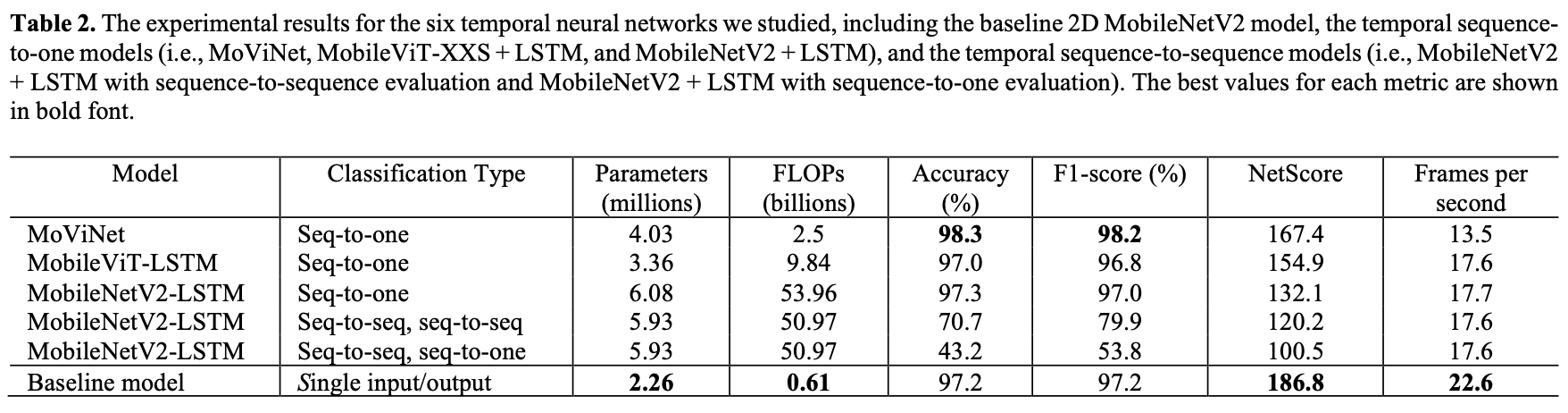
Sequential Image Classification of Human-Robot Walking Environments using Temporal Neural Networks
IEEE ICRA 2023 — Computer Vision for Wearable Robotics Workshop
Temporal neural network approach for dynamic walking environment state estimation in robotic prosthetics.
Selected Projects
-
UA-Datasets
Comprehensive collection of datasets for the Ukrainian language. Available as a Python package and on Hugging Face Hub.
-
Tower Defence RL Agent
Implementation of a classical Tower Defence game with a gym-like environment for training reinforcement learning agents.
 View on GitHub →
View on GitHub →
-
Raspberry Pi Car
Building a Raspberry Pi-powered autonomous car from scratch, including hardware assembly and remote control features.
View on GitHub →
-
Surviv.io Game Bot
Reinforcement learning agent for the online multiplayer battle royale game surviv.io.
 View on GitHub →
View on GitHub →
-
Quora Insincere Questions Classification
Kaggle NLP competition solution achieving silver medal in top 2% of competitors.
View on GitHub → -
Cross-lingual Multilingual BERT Analysis
Research on M-BERT's transfer learning capabilities across languages, comparing English-to-Russian transfer with RuBERT.
View on GitHub →
Let's get in touch!